
Fuel Cell Stabilisation
The System
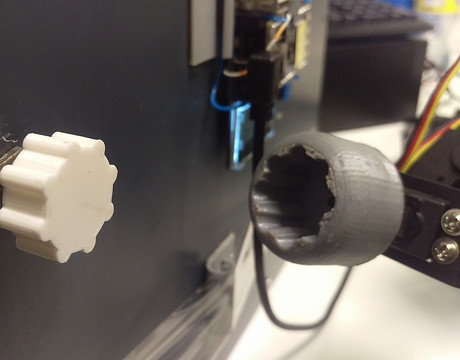
In order to manipulate and control the fuel cell stabilisation system, Kratos utilises a robotic arm system consisting of five motors integrated with an Arduino microprocessor, a 3D printed arm attachment, a wireless Xbox 360 controller and receiver and colour sensing module.
This will be used in conjunction with the live webcam feed to allow the user to position the arm in line with the cog on the stabilisation system.
Once this stage is complete the user will signal to the system that it is in the correct starting position, arm will rotate it's "wrist" motor until the fuel cell stabilisation board signifies that the fuel cell is stabilised by turning the red flashing LED green. At this point the arm will rotate and flick the switch and notify the user of a successful procedure.

Design Features

Robotic Arm Control
The user will use an Xbox 360 controller to wirelessly connect to an arduino with tuned controls for the five motors of the arm. Once the manual positioning is complete the operator will initiate the stabilisation procedure and the system will attempt to stabilise the fuel cell.

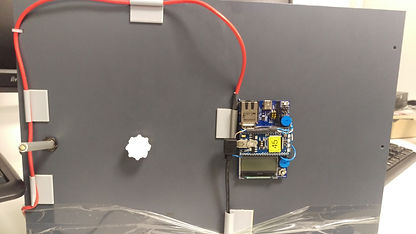
Colour Sensor
A colour sensor will be used to detect once the fuel cell has been stabilised by monitoring the colour of the light emitted on the board. Once a change in the RGB levels is detected by the photodiodes contained in the colour sensor, the system will stop moving the dial and proceed to the next stage of stabilisation.

Autonomous Stabilisation
After manual positioning is complete, the system will autonomously stabilise the fuel cell by rotating the dial, determining the appropriate position of the dial and then flicking the switch with no further user input. Upon completion of stabilisation the system will notify the user.
How to Control the Arm
I’m a paragraph. Double click here or click Edit Text to add some text of your own or to change the font. This is the place for you to tell your site visitors a little bit about you and your services.


Capabilities Demonstrated
-
Manipulation and control of the fuel cell stabilisation system - The system has been designed to fulfill this capability, this has been achieved by the addition of the cog attachment and control through and Xbox 360 controller via a webcam present on the DaNI.
-
Communication Failure Management - The arm is wirelessly connected separately to the other sub-systems, with an Xbox controller connected to the Arduino controlling the arm. A communication failure of the main system will not prevent the fuel cell stabilisation. Any disconnection between the Xbox controller and the Arduino can be resolved with a hard reset of the Xbox controller.
-
Autonomous Operation - Although the arm must be manually aligned, once this has been completed the system will use the information provided by the photodiodes in the colour sensor to autonomously stabilise the system, stopping the turning of the dial and flicking the switch automatically once this has been achieved. This demonstrates level 3 autonomy.
-
Collaborative Platform Integration - The system integrates an Xbox controller and wireless receiver, arduino processor and five servo motors. It also has a hard wired connection to the MyRio on Kratos allowing it to be manually positioned if required.
